 Dilshani Karunarathna
Dilshani Karunarathna
Mixed Reality based Multi-Agent Robotics Framework for Artificial Swarm Intelligence Experiments

Submitted for "Robotics and Autonomous Systems Journal" - Under Review
The term “Swarm Intelligence” is the collective behavior of a combination of many simple
individuals, where they operate autonomously. “Swarm Robotics” is the application of swarm
intelligence used in collective robotics. This has been a new approach to the coordination of
mass of robots that are capable of local communication, decentralized controlling, autonomous
and also operations based on biological inspiration senses.
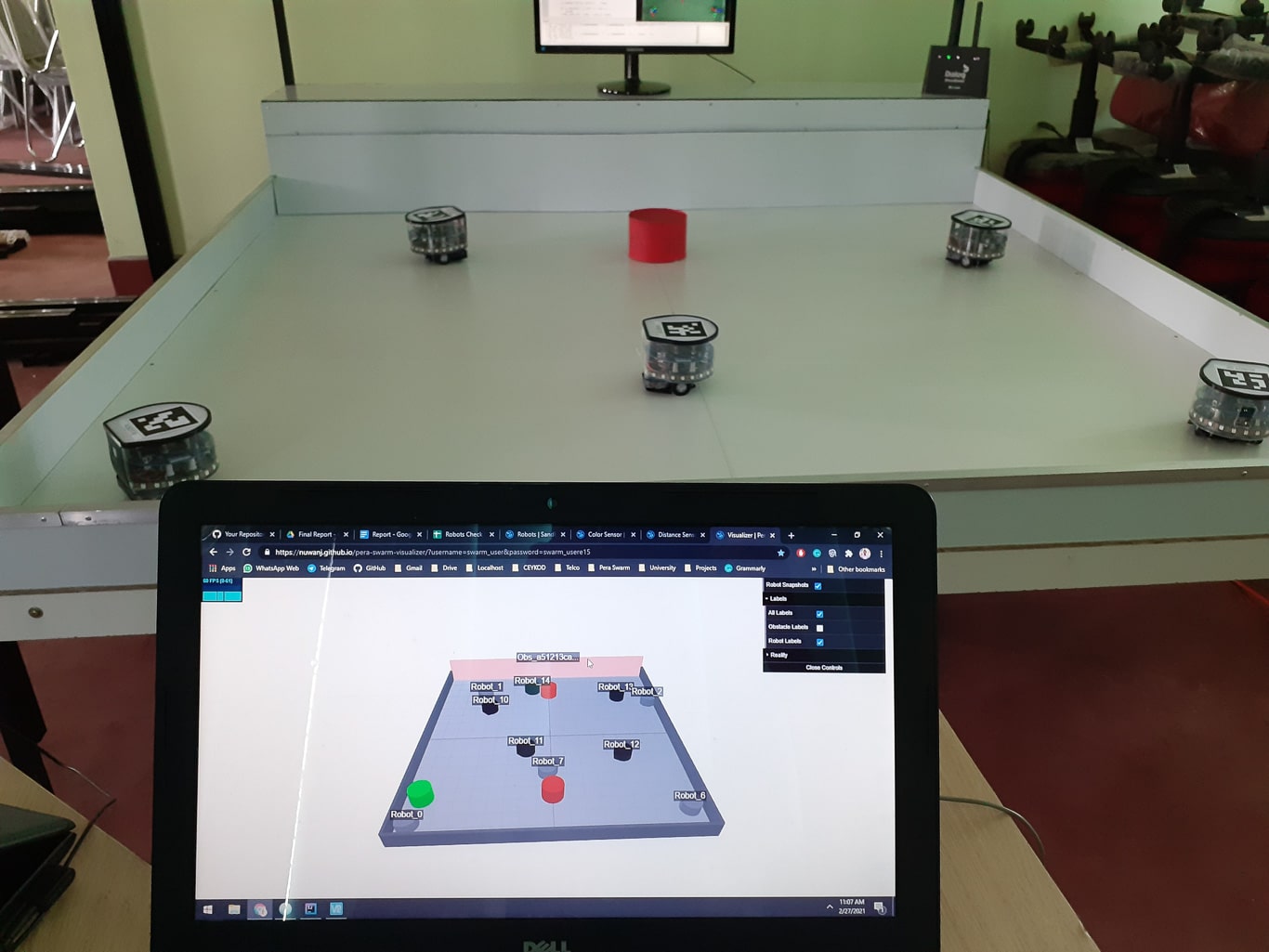
Experiments in this area frequently necessitate a large number of robots with specialized
hardware, which is typically expensive. In addition, it is necessary to conduct and test the
experiments in a well-controlled environment. This is a common concern among researchers working
in this field. So, the most common solution would be to use a simulator. However, it may not
accurately reflect the complexities of real-world experimentation.
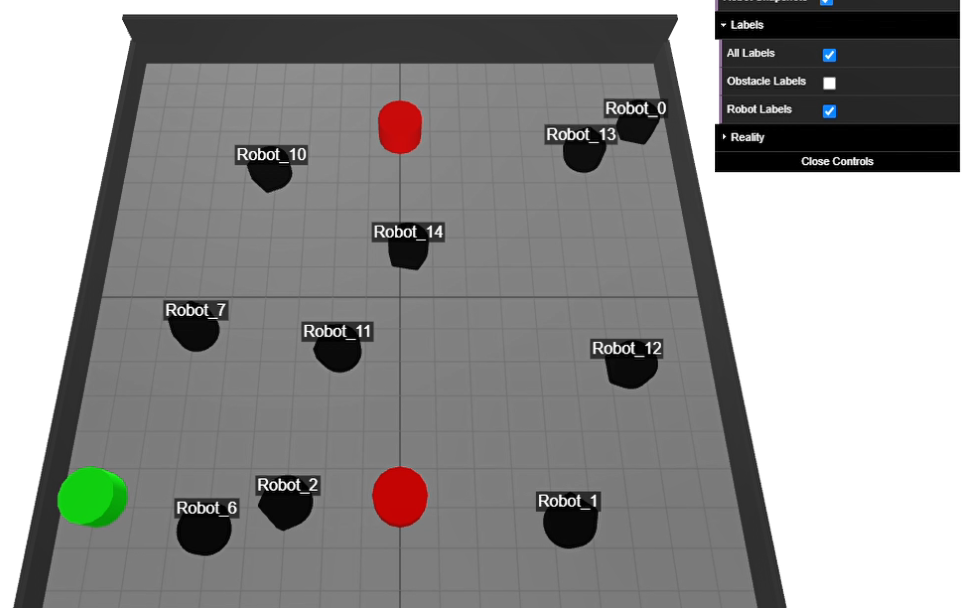
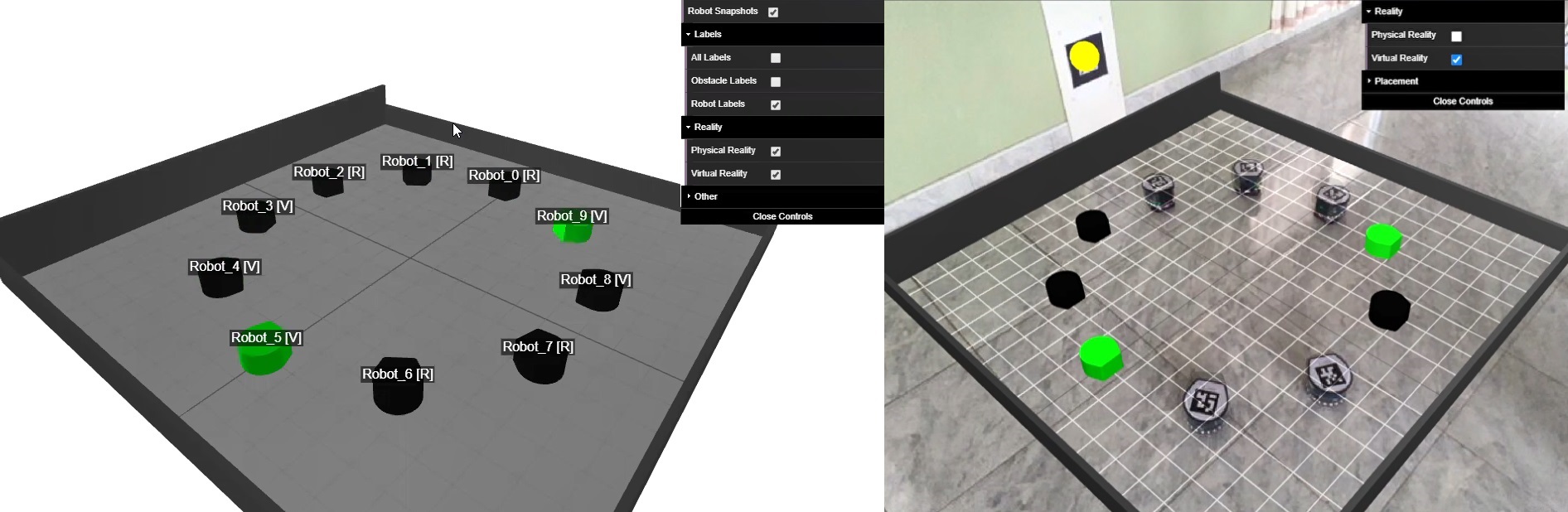
Therefore, we introduce a mixed reality framework that combines the two realities, allowing us
to model and execute swarm behavioral experiments with a few real robots and an unconstrained
number of virtual robot instances that emulate the characteristics of real robots.
Gallery

Authors
Dilshani Karunarathna
 Nuwan Jaliyagoda
Nuwan Jaliyagoda
 Ganindu Jayalath
Ganindu Jayalath
 Dr. Isuru Nawinne
Dr. Isuru Nawinne
 Prof. Roshan Ragel
Prof. Roshan Ragel
Resources/ Links
- Project Page
- Project Documentation
- Experiment: Color Ripple
- Experiment: Find Red Cylinder
- https://github.com/pera-swarm