 Dilshani Karunarathna
Dilshani Karunarathna
Mixed Reality based Multi-Agent Robotics Framework for Artificial Swarm Intelligence Experiments

Technological Advances in Science, Medicine and Engineering Conference (TASME) - Abstract Publication
Swarm Intelligence is the collective behaviour of many individuals toward a certain task, and
each operates autonomously and in a decentralised manner. As the world is heading towards a
future where automated robotic agents will be carrying out complex tasks without human
intervention, research on improving the collective intelligent behaviours of robots has gained
significant importance. Experimenting with a swarm of physical robots is challenging since
swarm intelligence experiments demand a large number of robotic agents, typically
prohibitively expensive, requiring special hardware and a well-controlled environment.
As an alternative, computer-based simulations with virtual agents have been predominantly
used in the literature. Simulations are easier to set up, less expensive, typically faster, and
more convenient to use than physical swarms. The two main advantages of virtual robot
simulators are the flexibility to add new features and efficiency. Virtual simulator frameworks
for multi-agent systems may integrate individual behaviour models, communication and
interaction models, and programming models. However, the persistent issue with the pure
virtual approach is that the simulators cannot always represent the intricacies in real-world
experiments, how they react to complex physics, noisy sensor data, control loop delays,
etc.
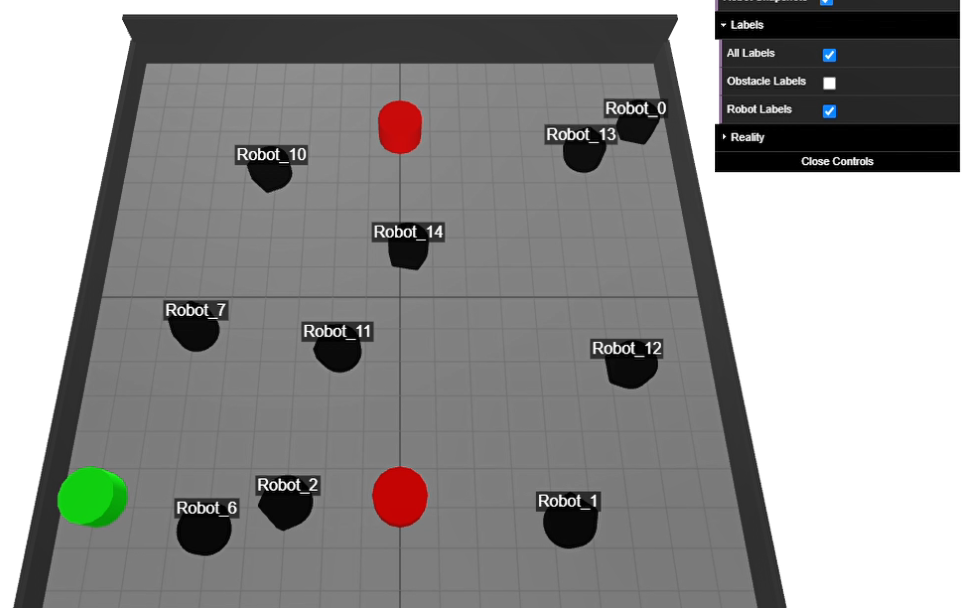
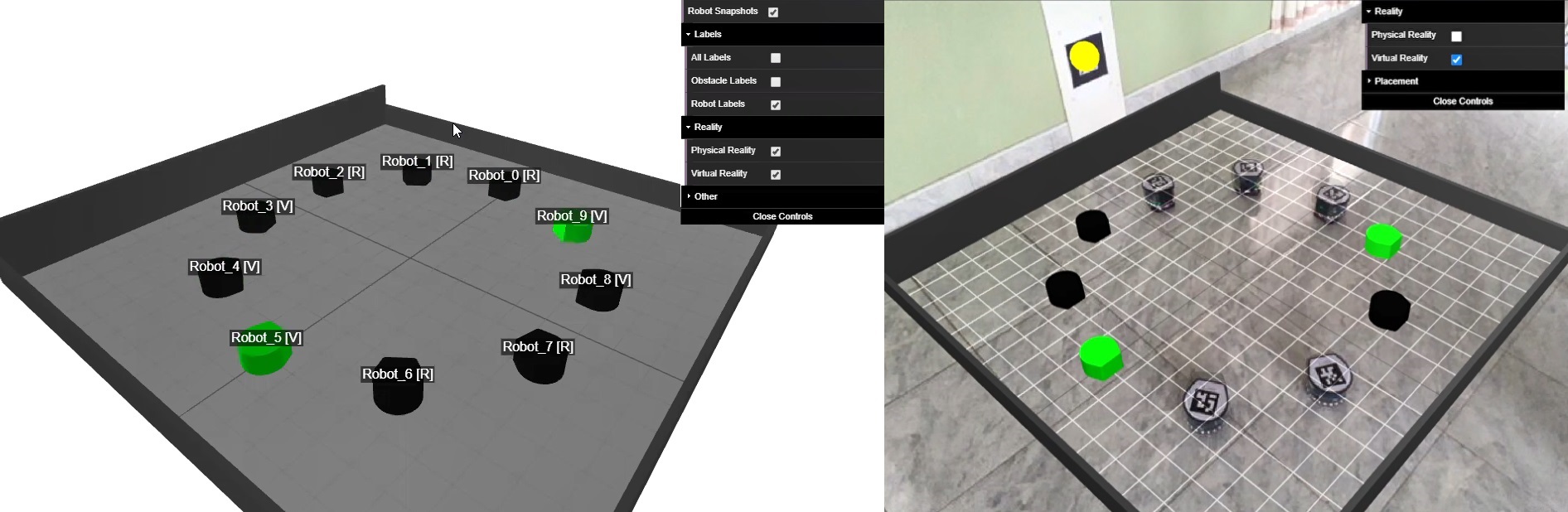
This research aims to introduce a mixed reality framework by merging the two realities and
modelling swarm behaviours in such a way that both real and virtual robotic agents, as well
as other environmental elements, can co-exist and interact with each other. In this approach,
all real robotic agents and environmental elements in the system are simultaneously
represented in virtual reality, while the simulated environment may contain various additional
elements that are purely virtual. Thus, this paves the way for the creation of safer and
lower-risk environments for extensive testing of swarm robotics behaviours, as well as an
unrestricted means of achieving agent and environment expansions that are physically
impossible or expensive in reality.
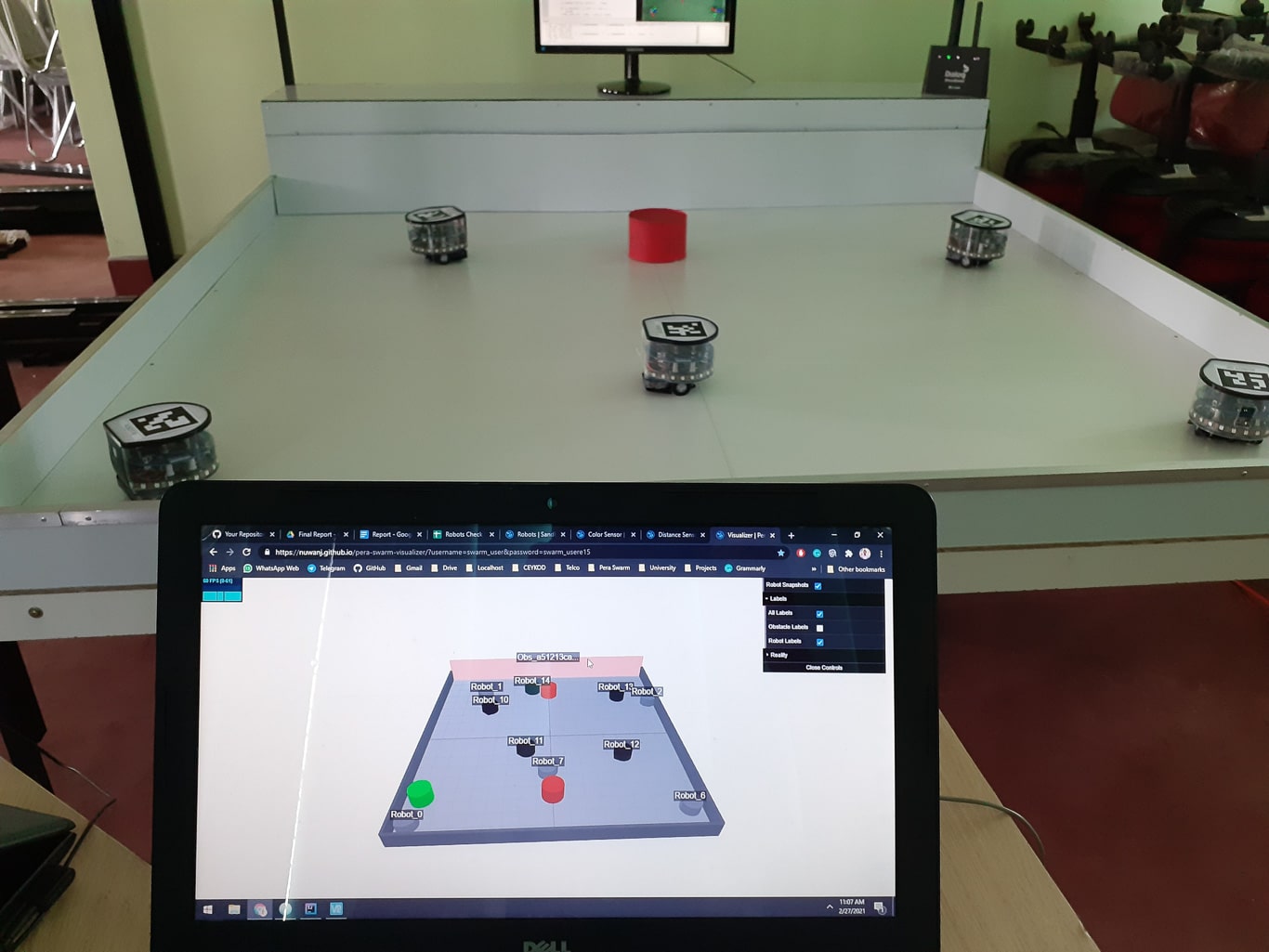
As the outcome of this study, a modular and customizable framework is introduced, with the
ability to handle the inter-reality sensing and communication and run the swarm behavioural
experiments with both real and virtual robots at the same time in the same environment, with
different physical and virtually defined environments.
Gallery

Authors
Dilshani Karunarathna
 Nuwan Jaliyagoda
Nuwan Jaliyagoda
 Dr. Isuru Nawinne
Dr. Isuru Nawinne
 Prof. Roshan Ragel
Prof. Roshan Ragel
Resources/ Links
- Project Page
- Project Documentation
- Experiment: Color Ripple
- Experiment: Find Red Cylinder
- https://github.com/pera-swarm